About Myself.
|
BRIEF INTRO.
I am a Ph.D. student at Robotics and Artificial Intelligence Lab in Tongji University. I have been working on Computer Vision, Deep Learning and Robotics. Currently, I focus on the area of 3D/RGB-D perception and applications of deep learning to computer vision, especially 3d object recognition and 6d pose estimation with multi-modal data (RGB images, depth images or point cloud). I am also interested in other vision-based perception and localization problems in both 2D and 3D world. My future work may involve:
EDUCATION
Sponsored by Prof. Dr. Qijun Chen
SKILLS
C++, Python, Matlab, Ubuntu, Deeplearning Framework(Tensorflow/Pytorch), Qt, OpenGL
| |||||
Publications.
[1] D. Wang, G. Zhou, Y. Yan, and Q. Chen. "GeoPose: Dense Reconstruction Guided 6D Object Pose Estimation With Geometric Consistency, " in IEEE Transactions on Multimedia. (SCI/IEEE trans)
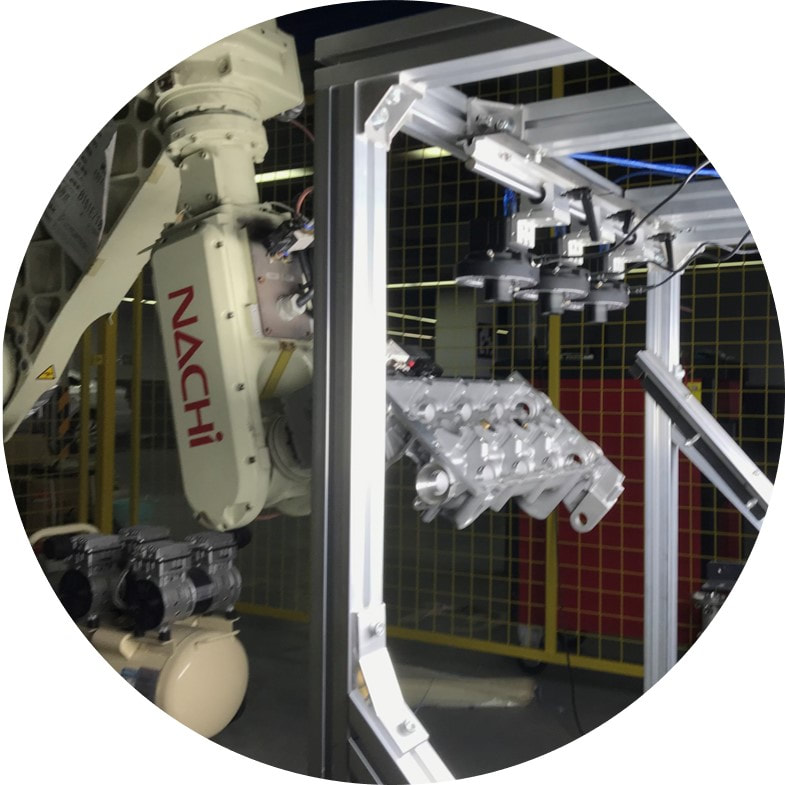
[2] D. Wang, Y. Yan, G. Zhou, et al. 3D Vision-Based Picking System with Instance Segmentation Network and Iterative Optimization Method[J]. Robot, 2019, 41(5):637-648. (EI)
[3] D. Wang, G. Zhou, Y. Yan, and Q. Chen. "Shape-constrained Self-supervised Object Pose Estimation With Multi-view Consistency". IEEE International Conference on Robotics and Automation (ICRA). (Preparing)
[4] Y. Yan, D. Wang, G. Zhou, and Q. Chen. Unsupervised Anomaly Segmentation via Multi-level Image Reconstruction and Adaptive Attention Level Transition. IEEE Transactions on Instrumentation and Measurement. (SCI/IEEE trans)
[5] G. Zhou, Y. Yan, D. Wang, and Q. Chen, "A Novel Depth and Color Feature Fusion Framework for 6D Object Pose Estimation," in IEEE Transactions on Multimedia, doi: 10.1109/TMM.2020.3001533. (SCI/IEEE trans)
[6] L. Lin, C. Liu, L. Ma, D. Wang, and Q. Chen, Arm Trajectory Generation for Humanoid Robot Based on STFT[J]. Robot, 2019,041(005), 591-600. (EI)
[7] G. Zhou, D. Wang, Y. Yan, and Q. Chen, "Semi-supervised 6D Object Pose Estimation Without Using Real Annotations", IEEE Transactions on Circuits and Systems for Video Technology (SCI Under Review)
[8] Y. Yan, D. Wang, G. Zhou, et al. Defect Segmentation with Contour Reconstruction for Irregularly Shaped Processed Surfaces on Engine Cylinder Covers. IEEE Transactions on Automation Science and Engineering(SCI Under Review)
[2] D. Wang, Y. Yan, G. Zhou, et al. 3D Vision-Based Picking System with Instance Segmentation Network and Iterative Optimization Method[J]. Robot, 2019, 41(5):637-648. (EI)
[3] D. Wang, G. Zhou, Y. Yan, and Q. Chen. "Shape-constrained Self-supervised Object Pose Estimation With Multi-view Consistency". IEEE International Conference on Robotics and Automation (ICRA). (Preparing)
[4] Y. Yan, D. Wang, G. Zhou, and Q. Chen. Unsupervised Anomaly Segmentation via Multi-level Image Reconstruction and Adaptive Attention Level Transition. IEEE Transactions on Instrumentation and Measurement. (SCI/IEEE trans)
[5] G. Zhou, Y. Yan, D. Wang, and Q. Chen, "A Novel Depth and Color Feature Fusion Framework for 6D Object Pose Estimation," in IEEE Transactions on Multimedia, doi: 10.1109/TMM.2020.3001533. (SCI/IEEE trans)
[6] L. Lin, C. Liu, L. Ma, D. Wang, and Q. Chen, Arm Trajectory Generation for Humanoid Robot Based on STFT[J]. Robot, 2019,041(005), 591-600. (EI)
[7] G. Zhou, D. Wang, Y. Yan, and Q. Chen, "Semi-supervised 6D Object Pose Estimation Without Using Real Annotations", IEEE Transactions on Circuits and Systems for Video Technology (SCI Under Review)
[8] Y. Yan, D. Wang, G. Zhou, et al. Defect Segmentation with Contour Reconstruction for Irregularly Shaped Processed Surfaces on Engine Cylinder Covers. IEEE Transactions on Automation Science and Engineering(SCI Under Review)
Research & Project
Summary of my researches and projects.(2015-present)
Pose Estimation
Sep 2017 - Present
|
Defect Detection
Sep 2017 - Present
|
RoboCup SPL
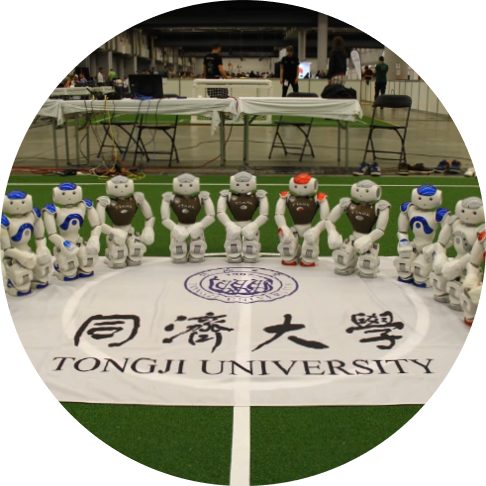
Sep 2016 - Sep 2017
|
Smart Car

Sep 2015 - Aug 2016
|

